Les moteurs d’aiguillage « Tortoise » et « Cobalt » sont conceptuellement similaires et permettent un mouvement d’aiguille très réel. Voyons comment on peut les piloter facilement avec le décodeur d’accessoires DCC de la série Helvest FleX.
Le choix et la préparation du matériel
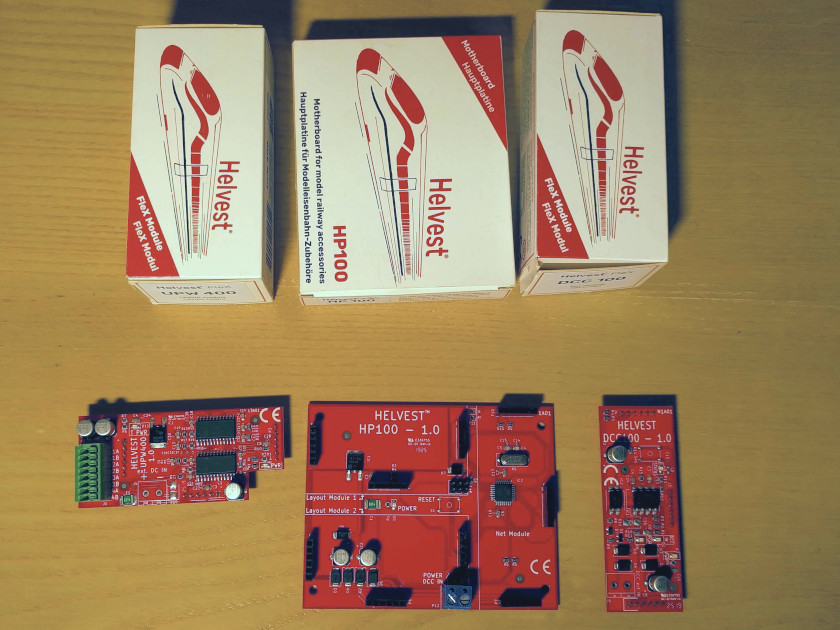
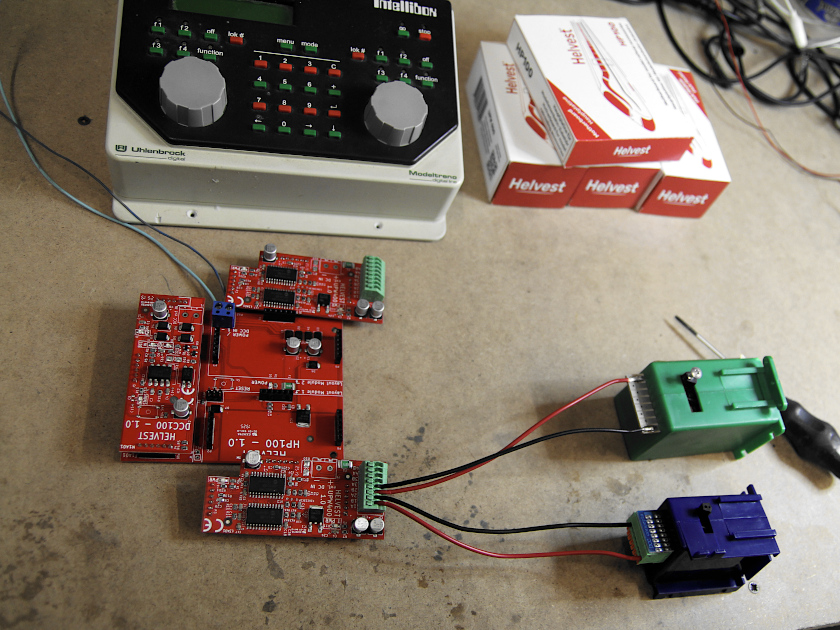
En plus des moteurs, pour monter le décodeur, vous aurez besoin d’une carte mère HP100, d’une carte Net DCC100 et du module pour piloter les aiguillages UPW400.
De gauche à droite : deux modules UPW400, le HP100 et le DCC100
Chaque module UPW400 fait fonctionner jusqu’à quatre aiguillages :
– Pour un décodeur qui contrôle quatre aiguillages, il faut un module UPW400.
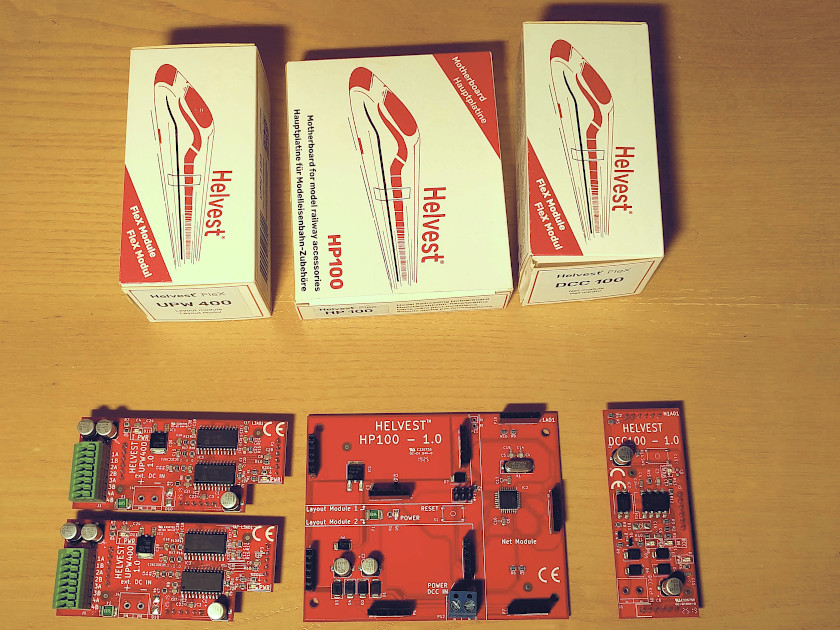
– Pour un décodeur qui contrôle huit aiguillages, il faut deux modules UPW400.
Bien sûr, si vous avez plus de huit interrupteurs, vous avez de la chance car vous avez une belle station, et vous aurez besoin de plus d’un décodeur.
Materiel pour un décodeur à quatre sorties.
Materiel pour un décodeur à huit sorties.
Trouvons les contacts sur les moteurs
Comme mentionné précédemment, les moteurs Tortoise et les moteurs Cobalt sont basés sur la même technologie. Il est donc nécessaire d’identifier deux contacts qui seront insérés dans les terminaux A et B de l’UPW400.
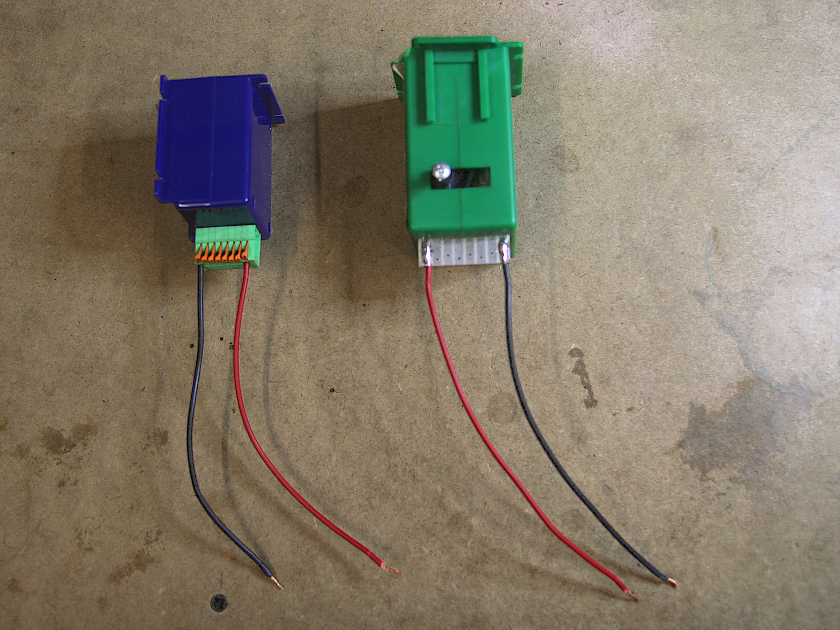
Ces deux moteurs ne sont pas particulièrement faciles à gérer en matière de connexion. Dans les deux cas, il n’y a absolument rien d’écrit sur la signification des nombreux contacts. Pour le Tortoise (vert dans la photo), les contacts qui font tourner le moteur sont ceux qui se trouvent aux deux extrémités. Il existe des connecteurs compliqués à insérer, nous avons préféré souder les deux fils. Pour le Cobalt, les contacts ne sont pas dans la même position dans toutes les séries de moteurs. Dans notre exemple les contacts sont également aux extrémités, voir les instructions sur le vôtre !
Une fois que vous avez déterminé les contacts dont vous avez besoin, connectez ou soudez deux fils. Nous avons mis un rouge et un noir, mais il n’est pas nécessaire de pouvoir distinguer les deux contacts, vous pouvez aussi utiliser deux fils identiques.
À gauche le moteur Cobalt, a droite le Tortoise.
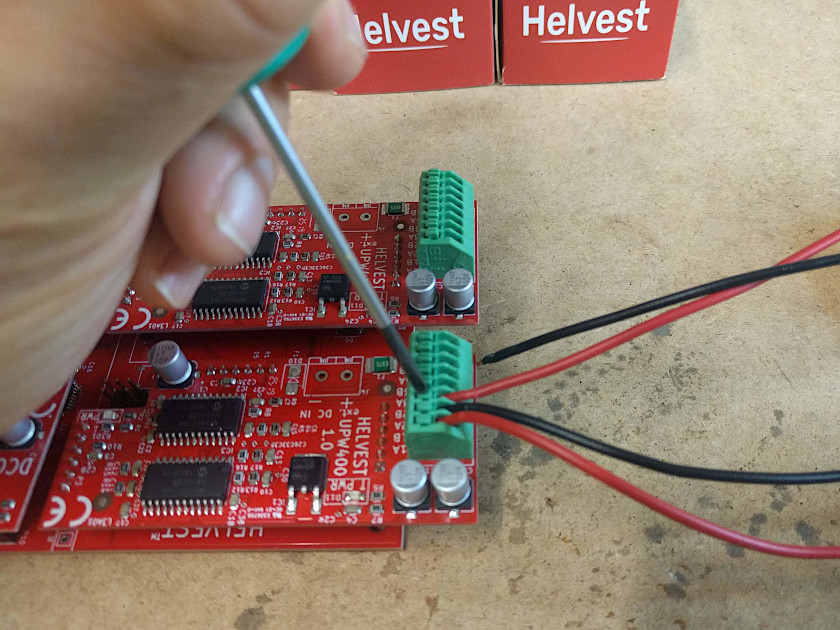
Les deux fils doivent être connectés à deux sorties A et B de l’UPW400 marquées du même numéro (1A et 1B, ou 2A et 2B, comme dans l’exemple)…
Connexion des sorties de l’aiguillage : pour chaque moteur, un câble va à une sortie A, l’autre à la sortie correspondante B. Dans l’exemple, les fils du Cobalt sont connectés en 1A et 1B, et les fils du Tortoise en 2A et 2B.
La connexion est faite. Comme le fonctionnement de ces moteurs est lent, nous vous recommandons d’augmenter un peu le temps de commutation comme expliqué dans le post approprié. Si vous devez programmer le décodeur, n’oubliez pas de déconnecter les modules Layout!
Pour programmer correctement les décodeurs Helvest, déconnectez temporairement les modules Layout.
Vous avez aimé cet article? Commentez ou posez des questions sur notre page facebook, mettez j’aime et partagez !
Our website uses cookies to make your browsing experience better. By using our site you agree to our use of cookies. AcceptSettingsRead More
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.