Verbindung von „langsamen“ Antriebe (Tortoise und Cobalt) mit Helvest-Decodern
Die Weichenantriebe „Tortoise“ und „Cobalt“ sind konzeptionell ähnlich und erlauben eine sehr realistische Bewegung der Zunge. Finden wir heraus, wie sie einfach mit dem DCC-Zubehördecoder der Helvest FleX-Serie gesteuert werden können.
Auswahl und Vorbereitung des Materials
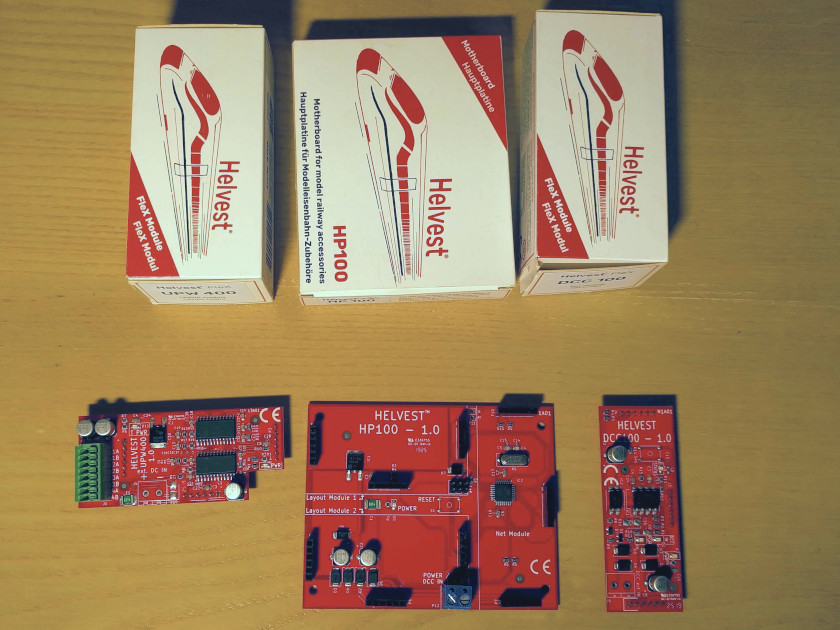
Zusätzlich zu den Motoren benötigen Sie zur Montage des Decoders eine HP100-Hauptplatine, eine DCC100-Netzplatine und das UPW400-Modul, das die Weichen ansteuert.
Von links: zwei UPW400-Module, das HP100 und das DCC100
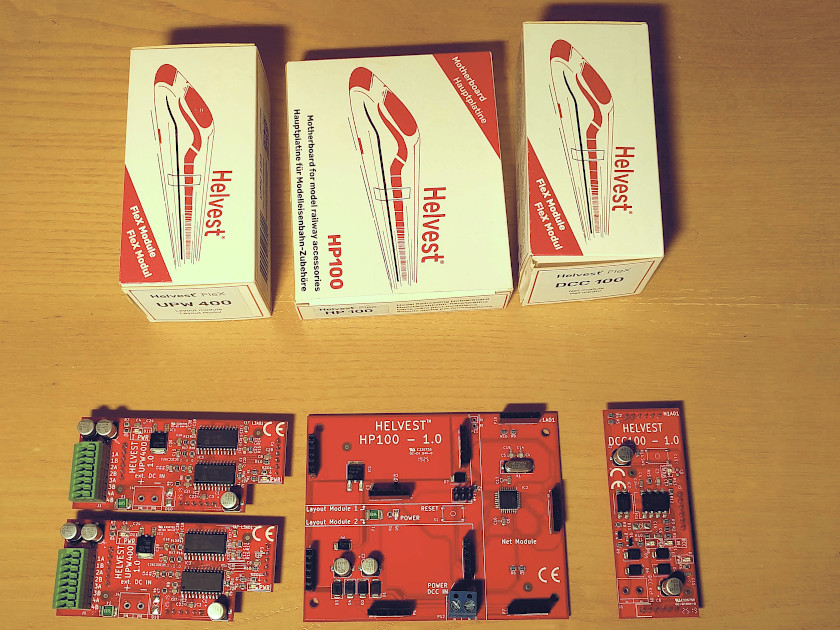
Jedes UPW400-Modul kann bis zu vier Weichen steuern:
– Für einen Decoder mit vier Weichen benötigen Sie ein UPW400-Modul.
– Für einen Decoder mit acht Weichen benötigen Sie zwei UPW400-Module.
Wenn Sie mehr als acht Weichen haben, haben Sie natürlich Glück, weil Sie eine schöne Station haben, und Sie brauchen mehrere Decoder.
Material für einen 4-Fach-Decoder
Material für einen 8-Fach-Decoder
Kontakte auf Motoren lokalisieren
Wie wir schon gesagt haben, basieren die Motoren von Tortoise und Cobalt auf der gleichen Technologie. Es ist daher notwendig, zwei Kontakte zu identifizieren, die in die Klemmen A und B des UPW400 eingefügt werden.
Diese beiden Motoren sind im Verbindungsmanagement nicht besonders freundlich. In beiden steht absolut nichts über die Bedeutung der vielen Kontakte geschrieben.
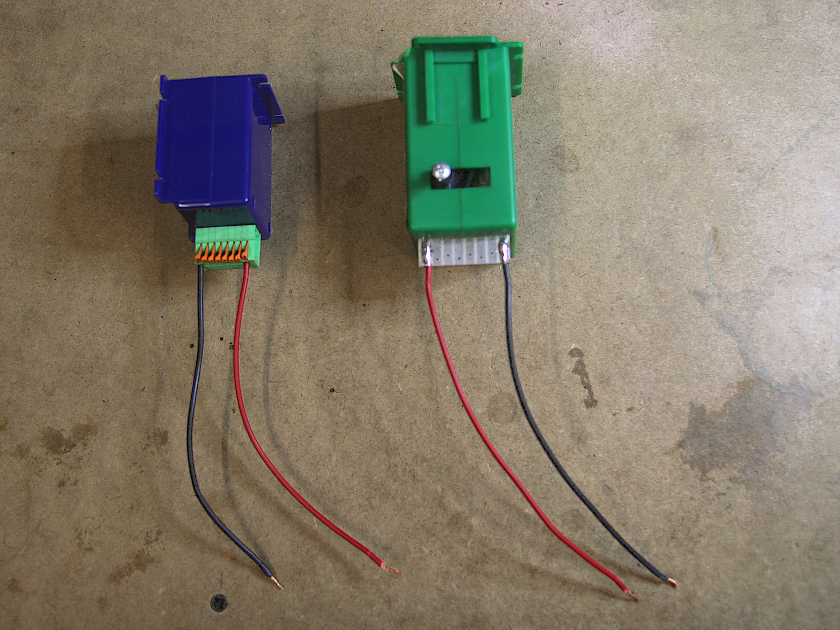
Die Tortoise ist der grüne Antrieb, den Sie auf dem Bild sehen. Die Kontakte, die den Motor bewegen, befinden sich an beiden Enden. Es gibt komplizierte Stecker einzufügen, wir haben es vorgezogen, die zwei Kabel zu verlöten.
Beim Kobalt ist die Situation kompliziert, weil die Kontakte nicht bei allen Motortypen in der gleichen Position sind. In unserem Beispiel sind die Kontakte an den Enden gleich, aber wir empfehlen Ihnen, die Anleitung für Ihren Motor zu lesen!
Wenn Sie herausgefunden haben, welche Kontakte Sie benötigen, verbinden oder verlöten Sie zwei Drähte. Wir haben einen roten und einen schwarzen Draht verbunden, aber es ist nicht notwendig, die beiden Kontakte unterscheiden zu können, Sie können auch zwei identische Drähte verwenden.
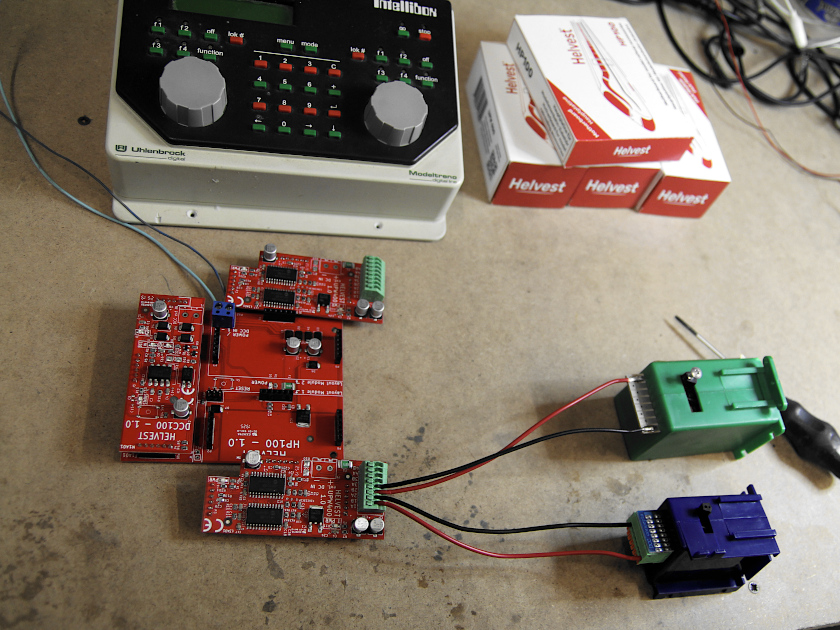
Links der „Kobalt“-Motor, rechts der Tortoise
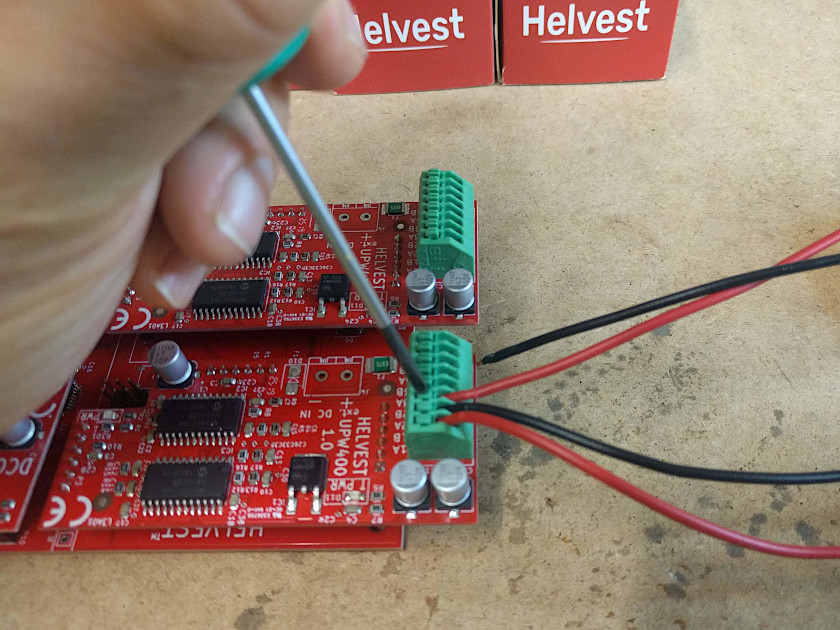
Die beiden Drähte müssen an die Ausgänge des UPW400 angeschlossen werden, natürlich an zwei Ausgänge A und B, die mit der gleichen Nummer gekennzeichnet sind (1A und 1B oder 2A und 2B, wie im Beispiel).
Anschluss der Weichenausgänge: Für jeden Motor geht ein Kabel an einen Ausgang A, das andere an den entsprechenden Ausgang B. Im Beispiel sind die Cobalt-Drähte in 1A und 1B und die Tortoise-Drähte in 2A und 2B angeschlossen.
Die Verbindung wird hergestellt. Da der Betrieb dieser Motoren langsam ist, empfehlen wir Ihnen, die Schaltzeit ein wenig zu erhöhen, wie in der entsprechenden Stelle erläutert.
Wenn Sie den Decoder programmieren müssen, erinnern Sie sich daran, die Layout-Module abzustecken!
Um die Helvest-Decoder korrekt zu programmieren, vergessen Sie nicht, die Layout-Module vorübergehend zu entfernen.
Nachdem Sie programmiert haben, setzen Sie die Layoutmodule wieder ein, verbinden Sie das DCC, und viel Spaß!
Our website uses cookies to make your browsing experience better. By using our site you agree to our use of cookies. AcceptSettingsRead More
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.