Collegamento dei motori “lenti” (Tortoise e Cobalt) con decoder Helvest
I motori per scambi “Tortoise” e “Cobalt” sono concettualmente simili e permettono un movimento molto realistico degli aghi. Vediamo come si possano facilmente pilotare con il decoder accessori DCC della serie Helvest FleX.
Scegliamo e prepariamo il materiale
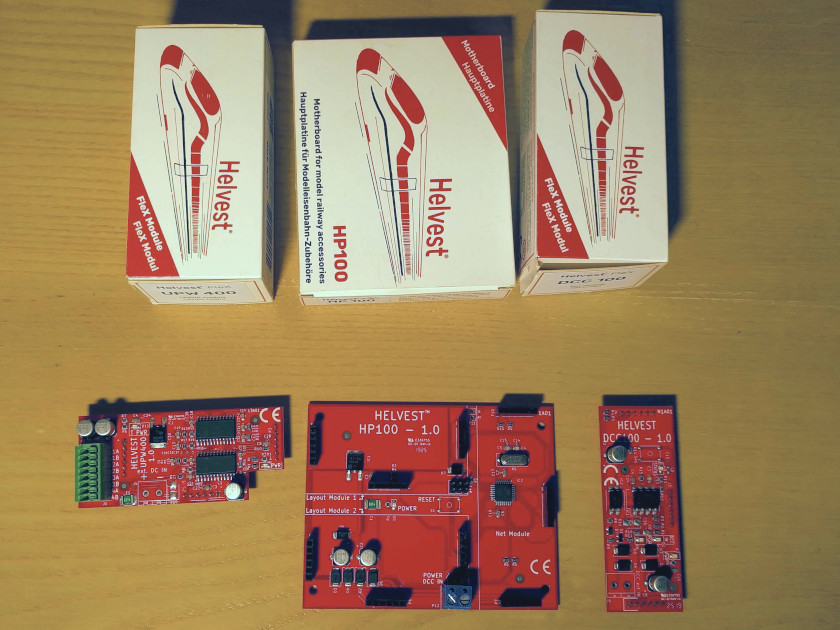
Oltre ai motori, per montare il decoder vi servirà una scheda madre HP100, una scheda Net DCC100, e il modulo per azionare gli scambi UPW400.
Da sinistra: due moduli UPW400, la HP100 e la DCC100
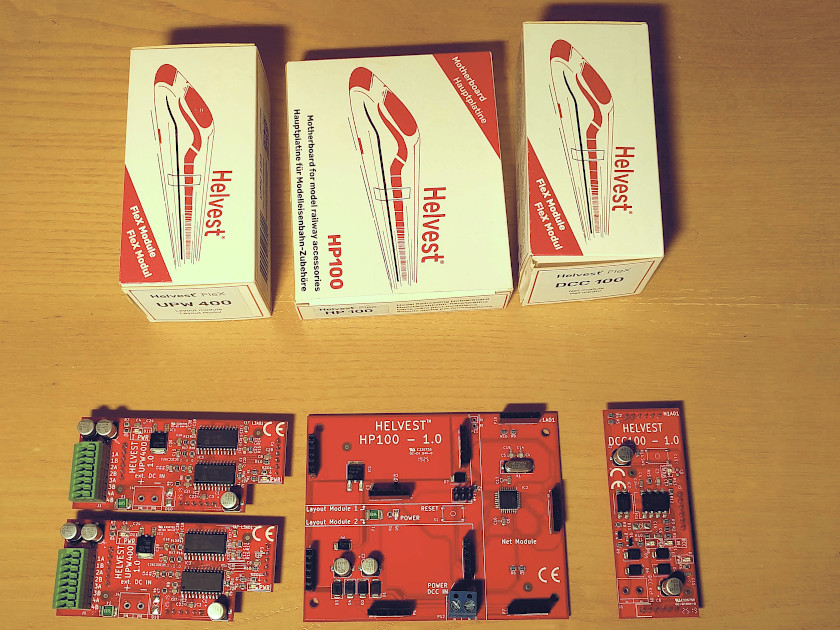
Ogni modulo UPW400 aziona fino a quattro scambi, quindi:
– per un decoder da quattro scambi vi serve un modulo UPW400
– per un decoder da otto scambi vi servono due moduli UPW400
ovviamente se avete più di otto scambi, siete fortunati perché avete una bella stazione, e vi servirà più di un decoder.
Materiale per un decoder da quattro uscite
Materiale per un decoder da otto uscite
Individuiamo i contatti sui motori
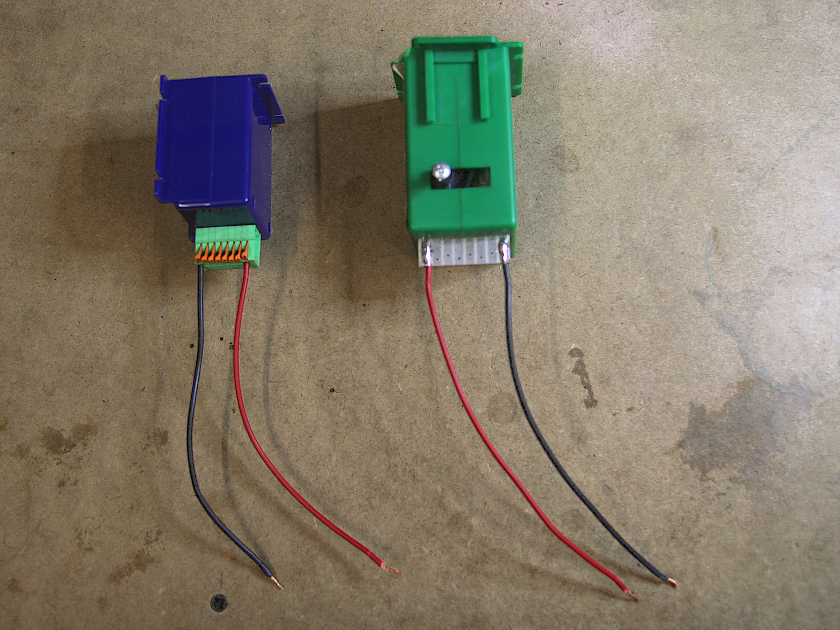
Come abbiamo detto, i motori Tortoise e i motori Cobalt si basano sulla stessa tecnologia. Occorre perciò individuare due contatti che andranno inseriti nei terminali A e B dell’UPW400.
Questi due motori non sono particolarmente amichevoli nella gestione del collegamento. In entrambi non c’è scritto assolutamente nulla sul significato dei tanti contatti. Per il Tortoise, quello verde nella foto, i contatti che muovono il motore sono quelli alle due estremità. Esistono complicati spinotti da inserire, noi abbiamo preferito saldare i due fili. Per il Cobalt, la situazione si complica perché i contatti non sono nella stessa posizione in tutte le serie di motori. Nel nostro esempio i contatti sono ugualmente alle estremità, guardate le istruzioni del vostro!
Compiuta l’impresa di capire quali contatti vi servono, connettete o saldate due fili. Noi ne abbiamo messo uno rosso e uno nero, ma non è necessario potere distinguere i due contatti, potete usare anche due fili uguali.
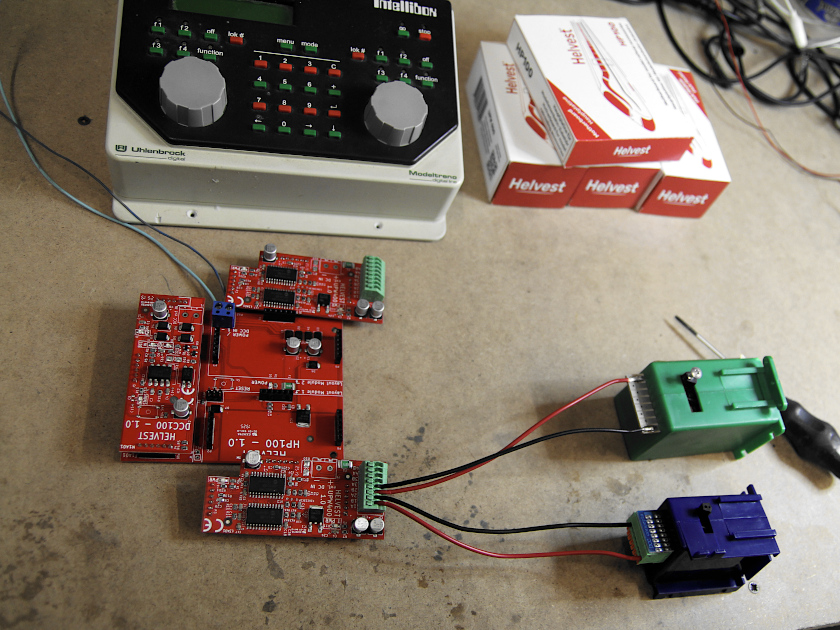
A sinistra il motore Cobalt, a destra il Tortoise.
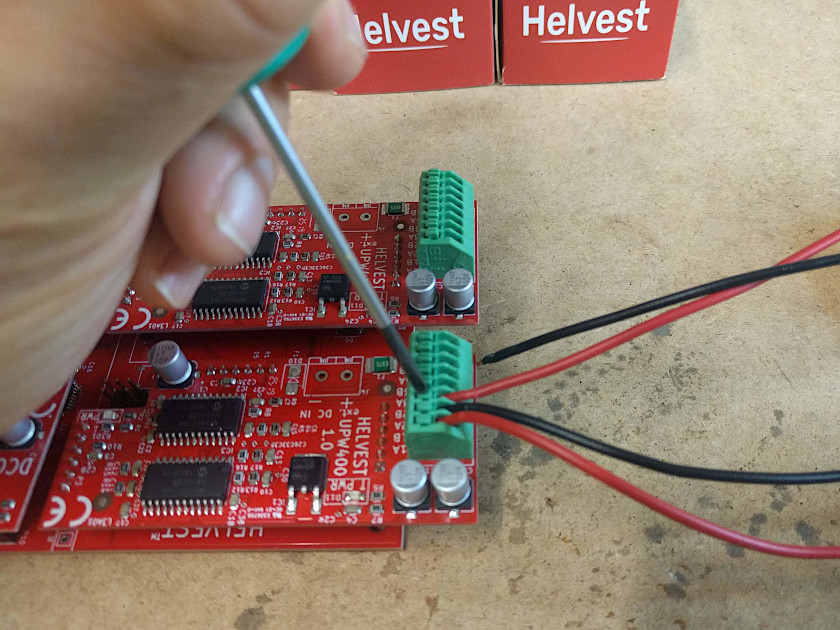
I due fili vanno connessi alle uscite della UPW400, ovviamente a due uscite A e B marchiate con lo stesso numero (1A e 1B, oppure 2A e 2B, come nell’esempio)..
Collegamento delle uscite degli scambi: per ogni motore, un cavo va in un’uscita A, l’altro va nella corrispondente uscita B. Nell’esempio i fili del Cobalt sono collegati in 1A e 1B, e quelli del Tortoise in 2A e 2B.
Il collegamento è fatto. Visto che il funzionamento di questi motori è lento, vi consigliamo di aumentare un po’ il tempo di commutazione come spiegato nell’apposito post. Se dovete programmare il decoder ricordatevi di scollegare i moduli Layout!
Per programmare correttamente i decoder Helvest, scollegate temporaneamente i moduli Layout.
Il collegamento è fatto. Visto che il funzionamento di questi motori è lento, vi consigliamo di aumentare un po’ il tempo di commutazione come spiegato nell’apposito post. Se dovete programmare il decoder ricordatevi di scollegare i moduli Layout!
Our website uses cookies to make your browsing experience better. By using our site you agree to our use of cookies. AcceptSettingsRead More
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.