Les secrets du module pour servo SM400
Suivant la philosophie Helvest, nous avons introduit quelques innovations dans le module servo SM400 pour rendre son fonctionnement plus réaliste et pour éliminer certains inconvénients que les modélistes rencontrent parfois lors de l’utilisation de ces intéressants moteurs. Dans cet article, nous les présentons plus en détail.

Adressage configurable
Avec tous les décodeurs DCC Helvest, chaque sortie individuelle peut avoir une adresse indépendante de toutes les autres.
Ainsi, si vous installez un décodeur avec, par exemple, 8 servos, comme celui de l’image, il est possible de donner au servo 1 une adresse, disons 36, au servo 2 une adresse complètement différente, disons 183, au servo 3 encore une autre, disons 1, et ainsi de suite. Il suffit d’écrire
dans la CV 120 : la valeur 36 ;
dans la CV 130 : la valeur 183 ;
dans la CV 140 la valeur 1 etc….
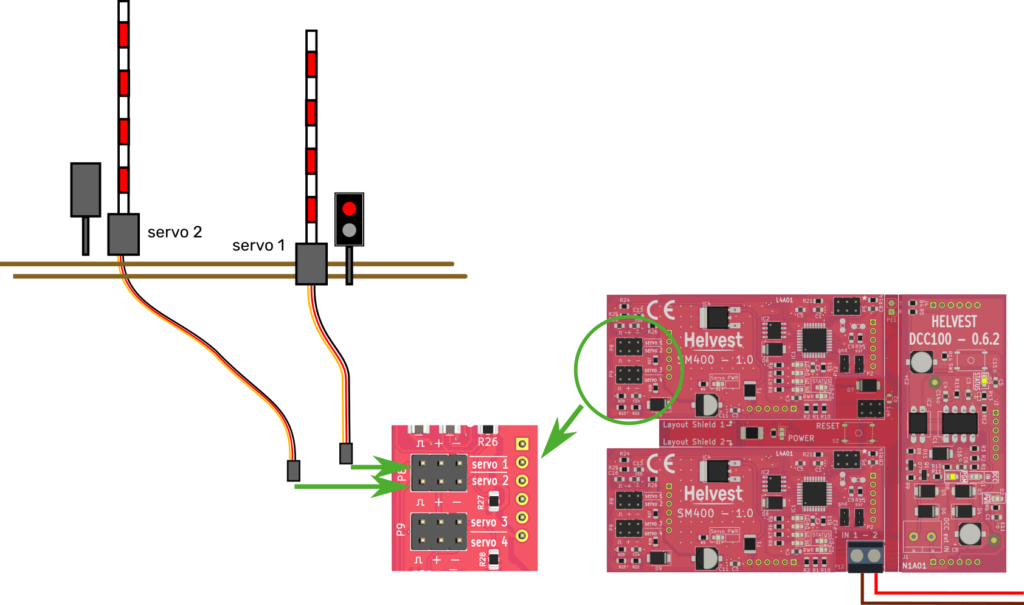
Cette fonction, expliquée en détail dans un autre article, présente un autre avantage particulièrement utile pour les servos : si vous voulez déplacer deux ou plusieurs moteurs en même temps, il suffit d’attribuer la même adresse aux deux sorties.
Cela peut être le cas, par exemple, avec des barrières à un passage à niveau, comme le montre l’illustration, qui sont connectées aux sorties « Servo 1 » et « Servo 2 ». Les barrières doivent bien sûr se déplacer ensemble, mais la programmation ne sera pas compliquée : il suffit d’attribuer la même adresse à la sortie 1 (CV120) et à la sortie 2 (CV 130).
Mémoire de la position
Les modules SM400 « se souviennent » de la position dans laquelle se trouve le servo. Le système peut être mis hors tension ou l’alimentation peut tomber en panne à cause d’un court-circuit ou d’une autre raison. Dans ce cas, le moteur reste dans la position dans laquelle il se trouvait au moment de l’interruption.
Cela présente deux avantages considérables sur le plan pratique :
1) Si l’alimentation électrique est interrompue intentionnellement ou en raison d’un défaut ou d’un court-circuit, il n’est pas nécessaire de contrôler à nouveau les servos.
2) Lors du démarrage du réseau ferroviaire miniature, cela évite de générer un courant élevé en déplaçant les moteurs ensemble.
Cela augmente la fiabilité de votre réseau en cas de problème.
Capteur de consommation de courant
Une autre nouveauté est le capteur qui surveille si le moteur consomme trop de courant : si le moteur est chargé au-delà d’une certaine valeur, l’alimentation électrique est automatiquement interrompue.
Cela permet d’éviter d’endommager les mécanismes auxquels le moteur est connecté s’ils sont surchargés pour une raison quelconque.
Par exemple, si le moteur est mal réglé, il pourrait surcharger et déformer la barrière du passage à niveau ou l’aiguille d’un aiguillage.
De plus, la fiabilité du train miniature est encore améliorée : un moteur qui consomme trop de courant peut affecter l’alimentation d’autres appareils ou décodeurs.
Ainsi, le problème d’un moteur n’entraîne pas un dysfonctionnement de l’ensemble du réseau, car le moteur est temporairement exclu.
La valeur d’intervention de cette commande peut bien sûr être réglée pour chaque sortie individuelle, avec les CV 126 (pour le servo 1), 136 (pour le servo 2), 146 (pour le servo 3)… jusqu’à 196 (pour le servo 8). Une valeur plus élevée augmente le seuil d’intervention (c’est-à-dire que le moteur peut appliquer plus de force sans intervention de la commande), une valeur plus faible rend la commande plus sensible (c’est-à-dire que la force à laquelle le système interrompt la puissance est plus faible).
Bien sûr, si pour une raison quelconque vous n’êtes pas intéressé par cette fonction, vous pouvez l’exclure complètement pour une ou plusieurs sorties : écrivez la valeur 255 dans le(s) CV des moteurs où vous ne la voulez pas, et vos moteurs pourront libérer toute leur puissance.